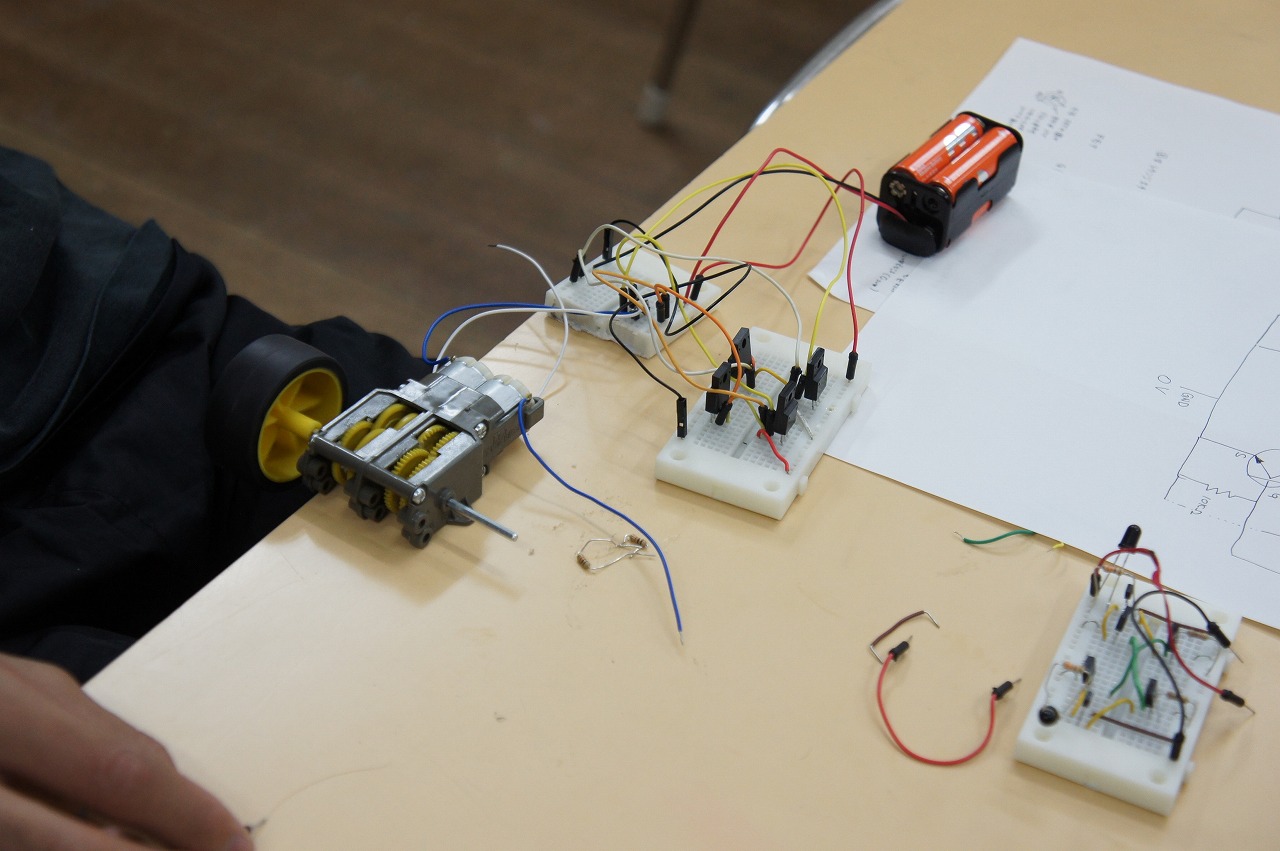
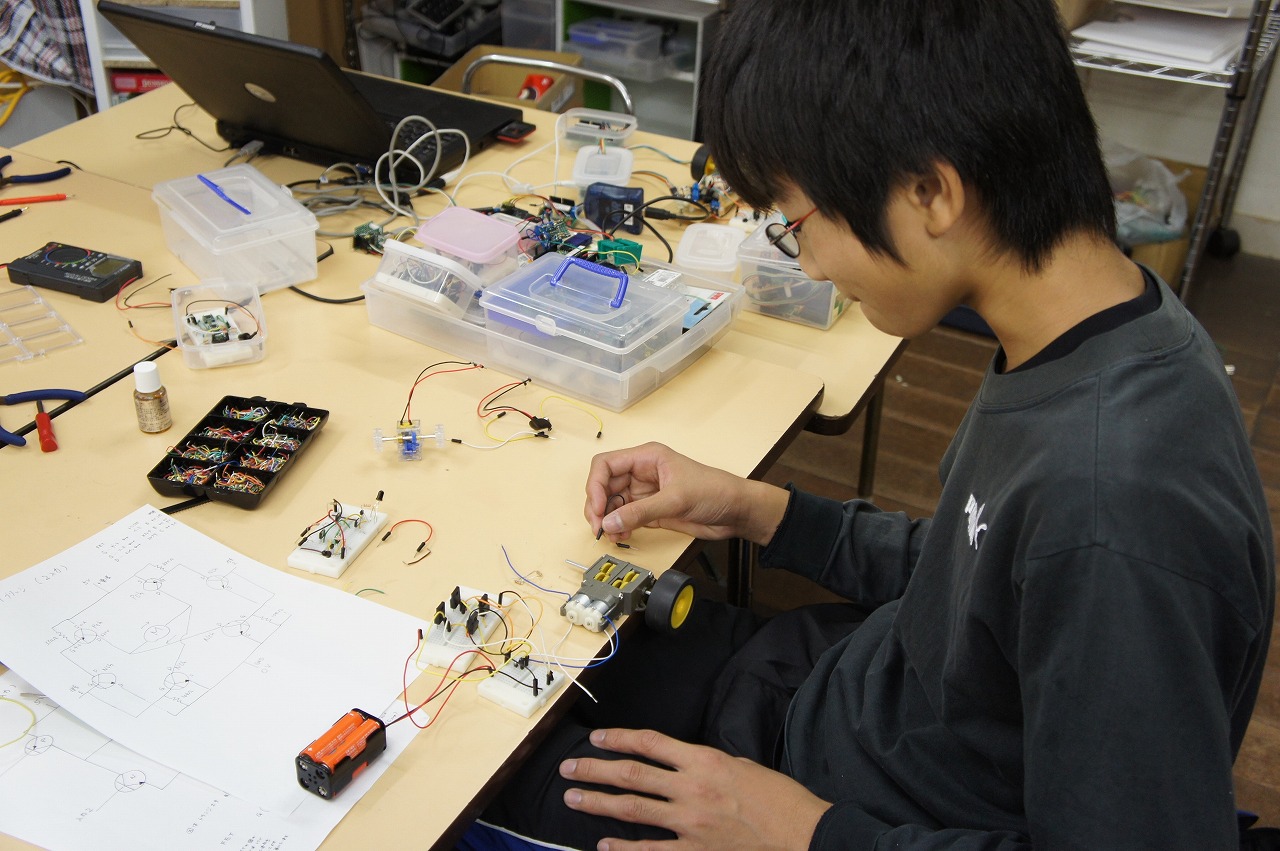
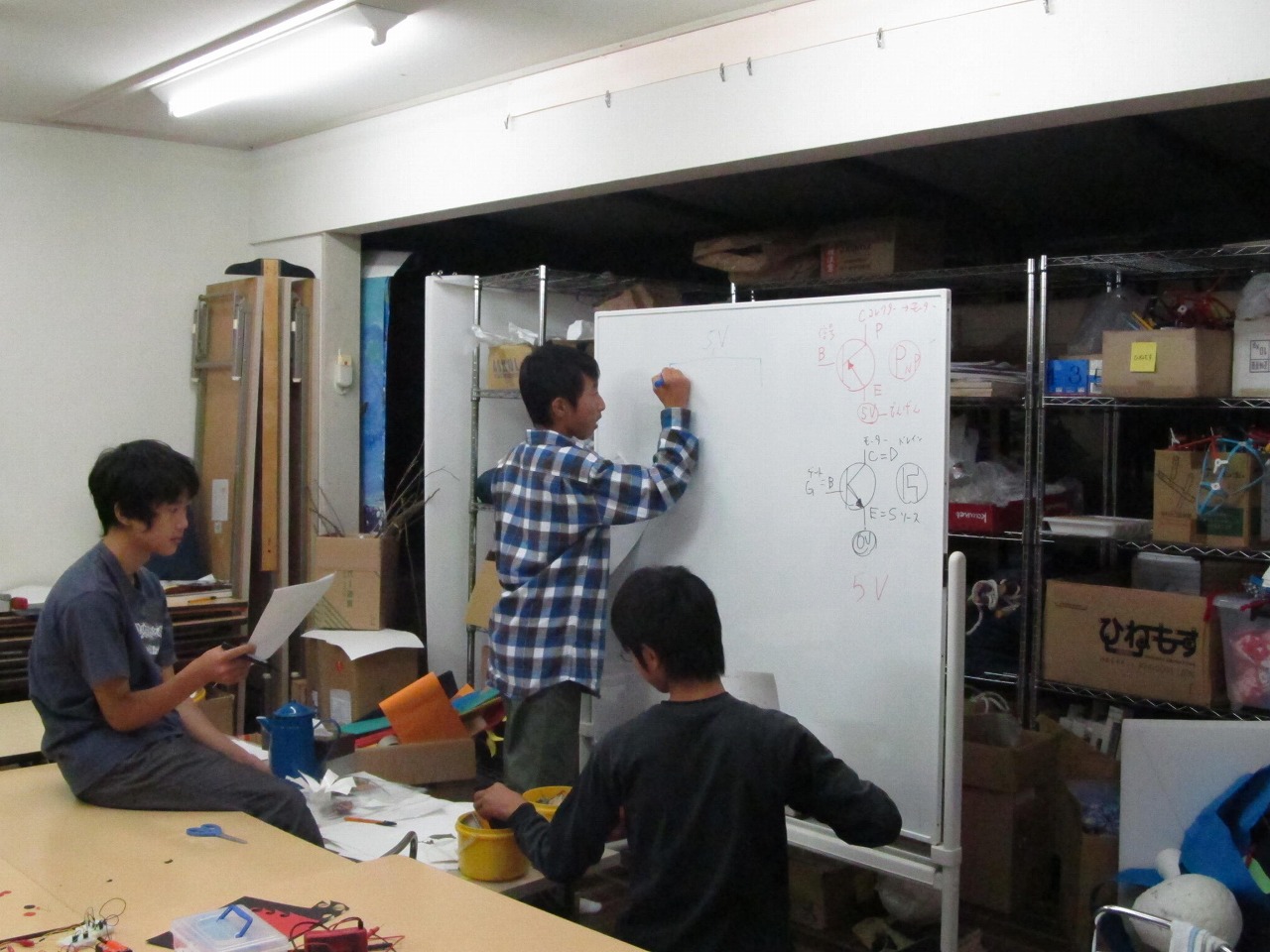
福西です。最近の様子です。3回分の授業をかけて、Hブリッジ回路を製作しています。
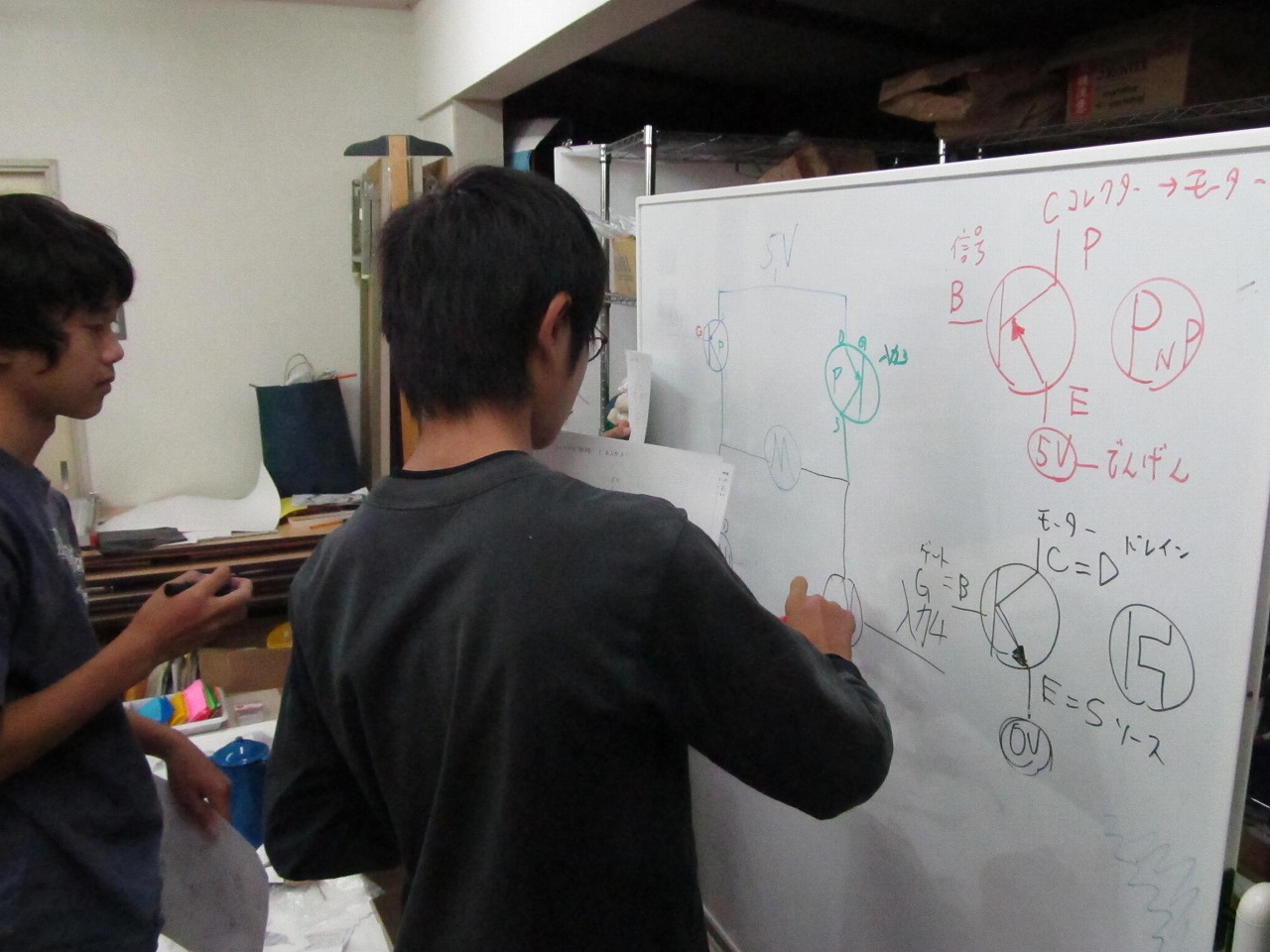
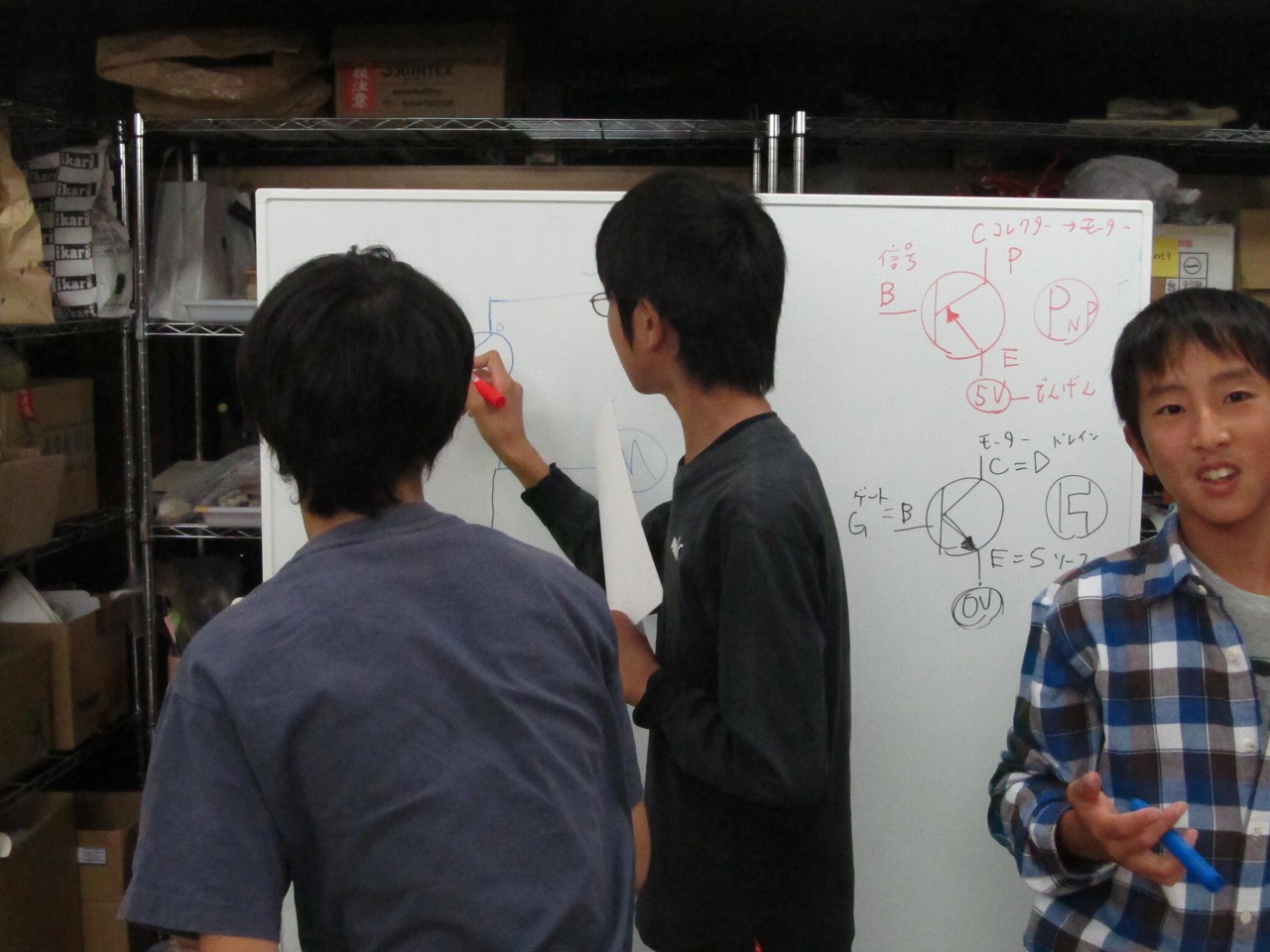
まずは回路の説明をしてから、それを自分でも説明できるかどうか、ホワイトボードに書いてもらいました。
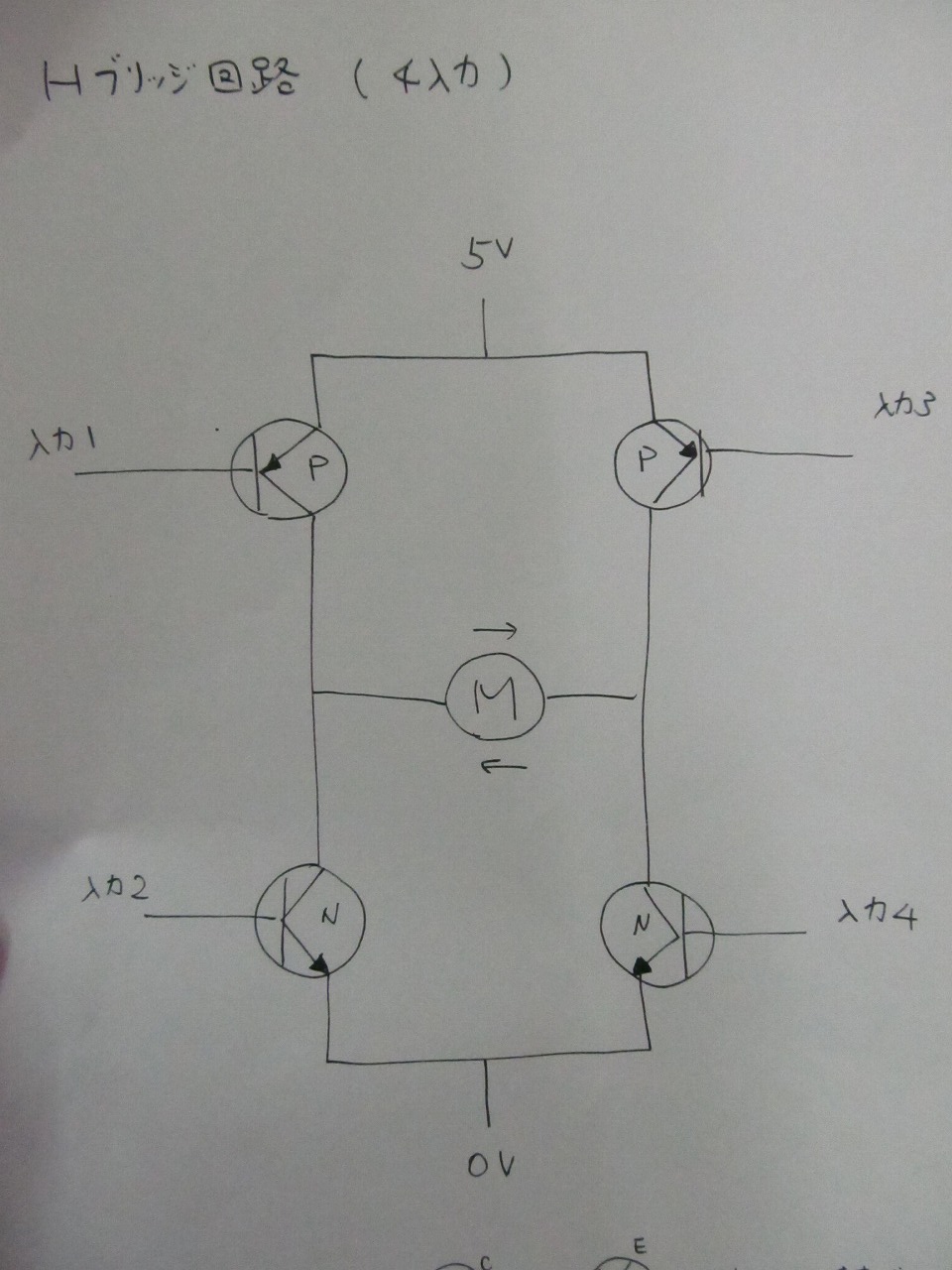
Pch(PNP)2個、Nch(NPN)2個によるHブリッジ回路。
これが基本となる回路です。ここでは詳しい説明は割愛しますが、実は弱点が2つあります。
1)信号線(入力)が4本もいる。
2)PWM制御をかけようとすると、上段Pchの入力が不安定となる。
1)は、物理的な不便さという問題です。この回路1つでモーター1つが動かせますが、モーター3つだと単純に12本の信号線が必要となります。一方マイコン(Arduino)の出力ポートは13本なので、それだけで手いっぱいとなってしまいます。できれば線は半分に減らしたいものです。
しかしそれよりも切実な問題が、2)です。この簡易版のHブリッジ回路では、PWM制御をかけることができません。もしそれをすると、モーターが停止状態にあるときに、Hブリッジの縦に並んだ二つのFETに貫通電流が流れて、ものすごく発熱してしまいます! これは危険です。しかしPWMは便利なので、ぜひとも使いたい・・・というわけで、これをどうするか、というのが、次の問題です。
(補足)
PWMというのは「パルス・ワイド・モデュレーション」(矩形幅変調)の略ですが、たとえば5Vの電源でないと動かない回路を、2Vで動かそうとしても、ふつうはやっぱり動きません。けれども、5Vと0Vの「オン・オフ」を高速の繰り返した矩形(パルス)波を入力信号とすると、5Vの間だけは動くわけですから、その時間(矩形波の幅)に応じてモーターの回転も変化させることができます。(たとえば今の例なら、オンとオフの時間幅を2:3に変えることで、実質2Vの出力が得られます)。これがPWM制御です。そしてこれを使うと、センサーの値に応じて速度を変えたり、両輪の回転のバラつきを調整したりできます。
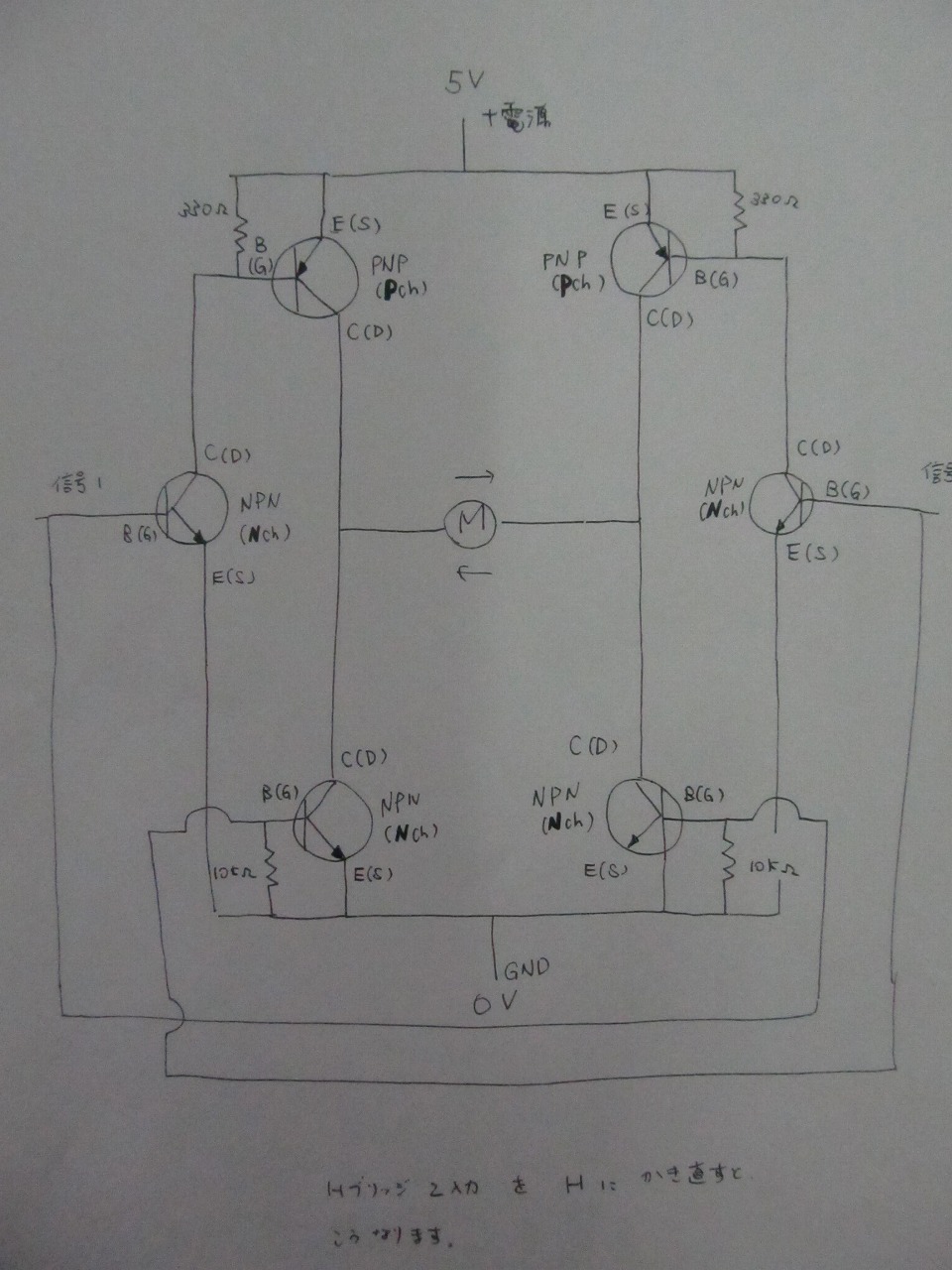
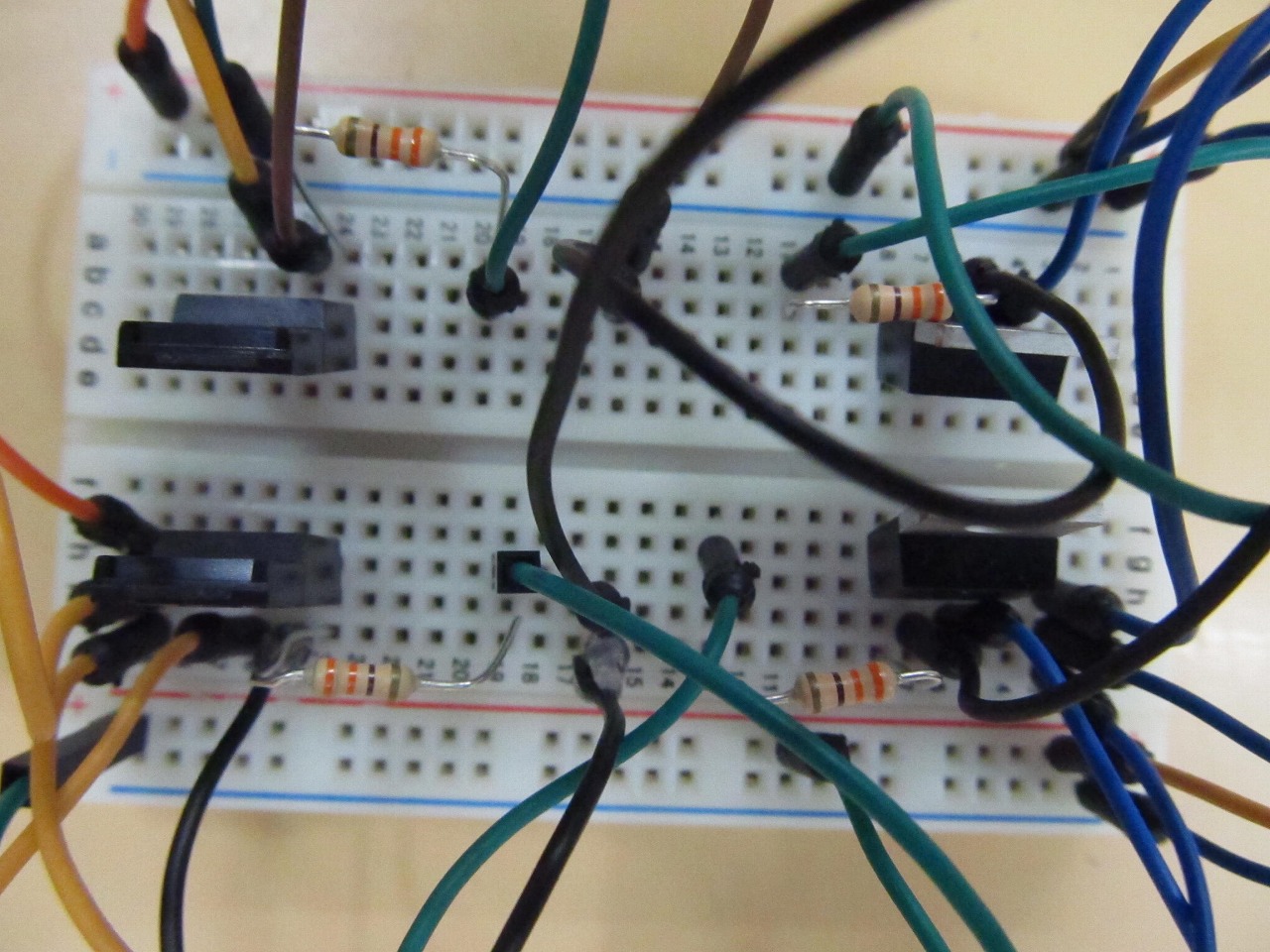
最初の回路の欠点を解決したのが、これです。上段Pchの前段にさらにNch2個を追加して、計6個のFET(ダイオード)で組んでいます。PWM制御をかけても入力が安定し、また入力を2本にまとめることができます。これなら実用に耐えることができます。(ただしこの回路ではPWMの応答がリニアーではないので、そうするにはまた入力を4本に戻す必要があります)。


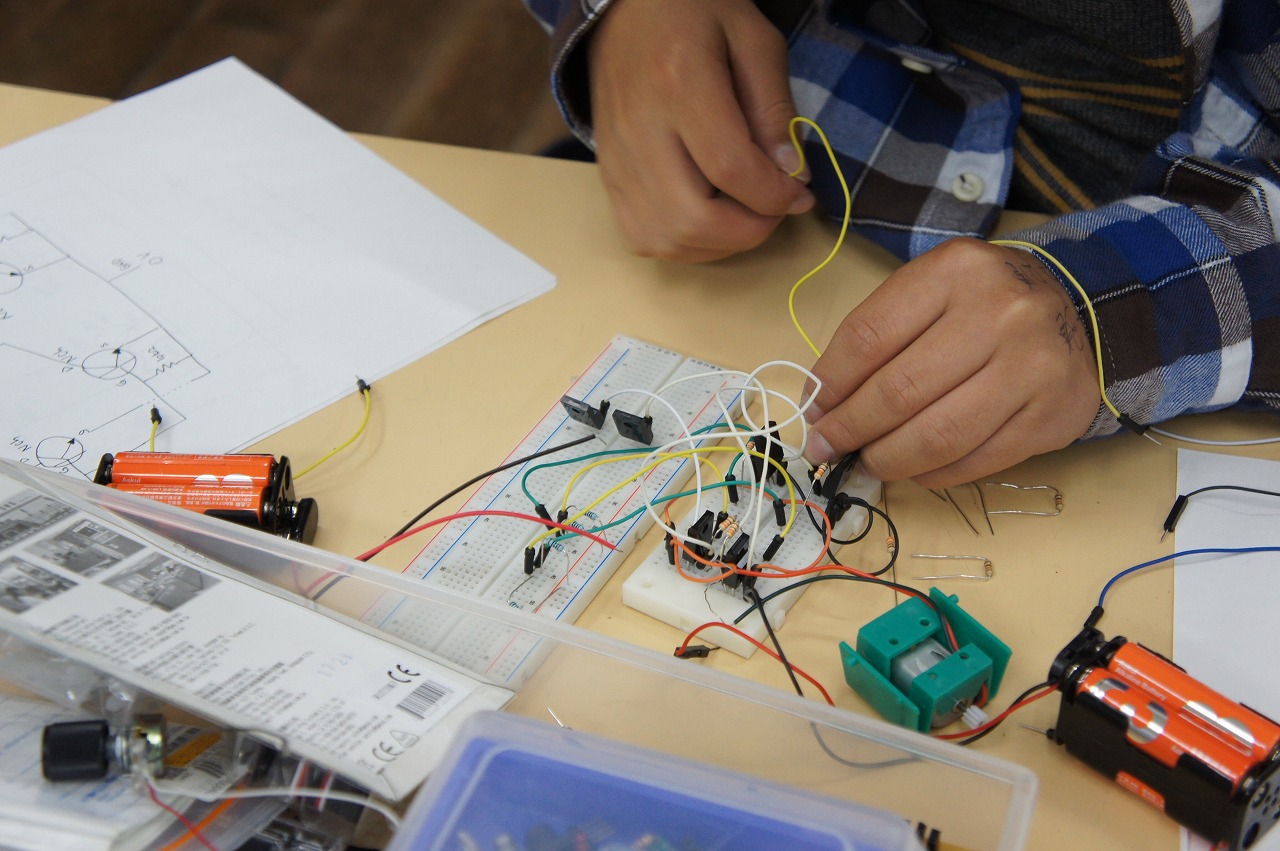
3人ともFET4個の回路には成功し、そのあと6個の回路に取り組んでいます。今のところA君がPWM用の正回転、逆転に成功しています。H君とR君はもう少しでできそうです。ブレッドボード上で試運転ができたら、いよいよ基板にはんだ付けを行い、モジュール化します。