福西です。
3回目(4/26)は、前回に引き続き、ロジック回路の使い方を勉強しました。NAND回路から、NOT、AND、OR、XORといったロジックが構成できることをブレッドボード上で確かめました。また最後の時間には、そのロジック回路を使ったライントレーサーの紹介をしました。
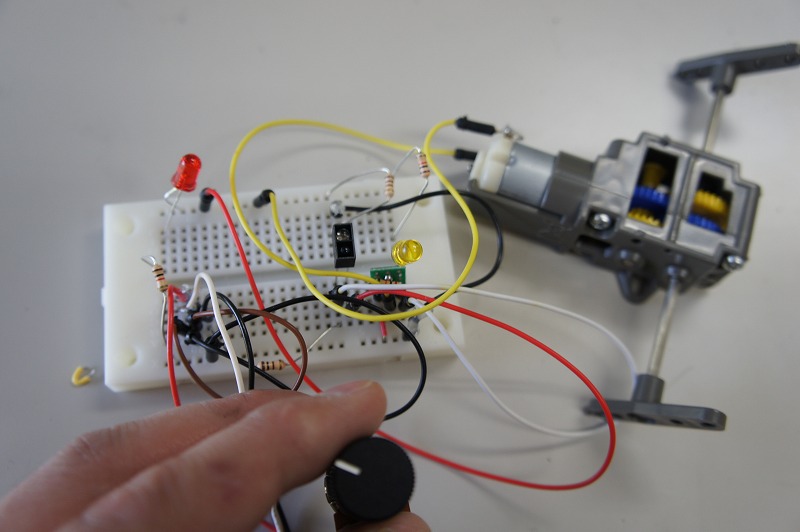
4回目(5/10)は、ライントレーサーのセンサー部分である、赤外線反射モジュールの仕組みを説明し、ブレッドボード上で構成しました。モジュールは、1)赤外線LEDと、2)フォトトランジスタの二つに、3)固定抵抗と、4)半固定抵抗をつないで構成します。
1)は波長の変わっただけで、使い方は普通のLEDと同じです。2)も、普通のNPN型トランジスタとほぼと同じで、ただベースにおける電流が光に置き換わっているというように理解します。意外に難しいのが4)の扱いです。これは足が三本の抵抗です。なので足をどのようにつなげばよいか、最初は慣れるまで混乱があると思いますが、おいおい手の内に入れていきましょう。
5回目(5/17)は、前回に作った回路を、実際にはんだ付けして基板上に構成しました。
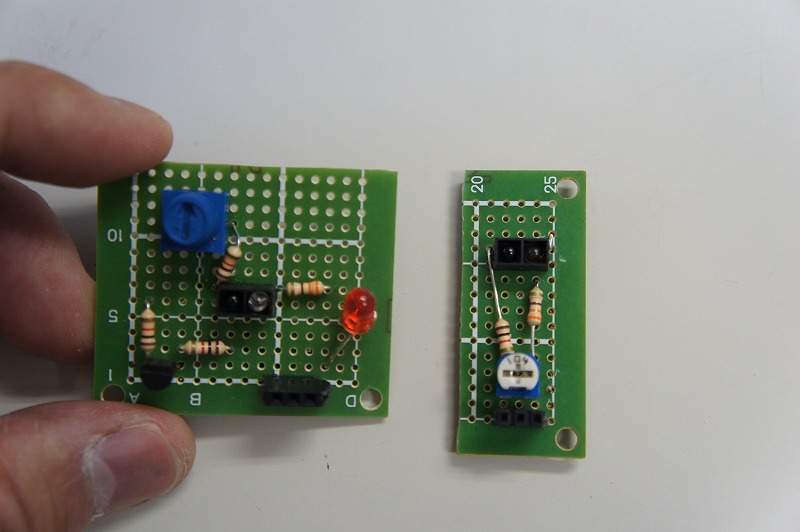
(R君とH君が制作した赤外線反射モジュール)
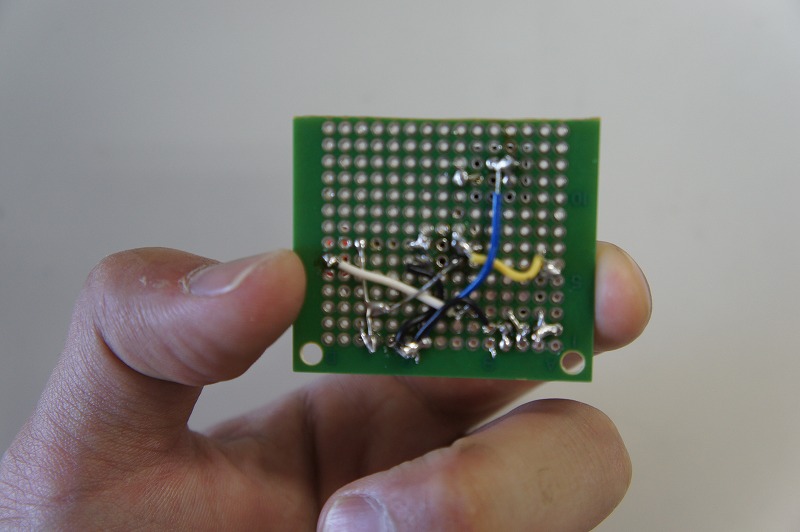
(裏のはんだ付け面はこんな感じに)
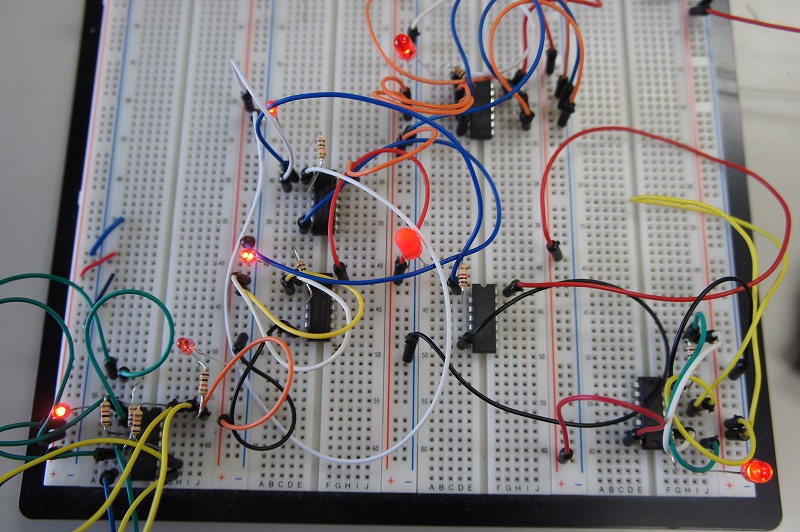
ブレッドボード上でのロジック回路の動作確認。今学期から、一人一つずつこのような広いブレッドボードを使って実験しています。
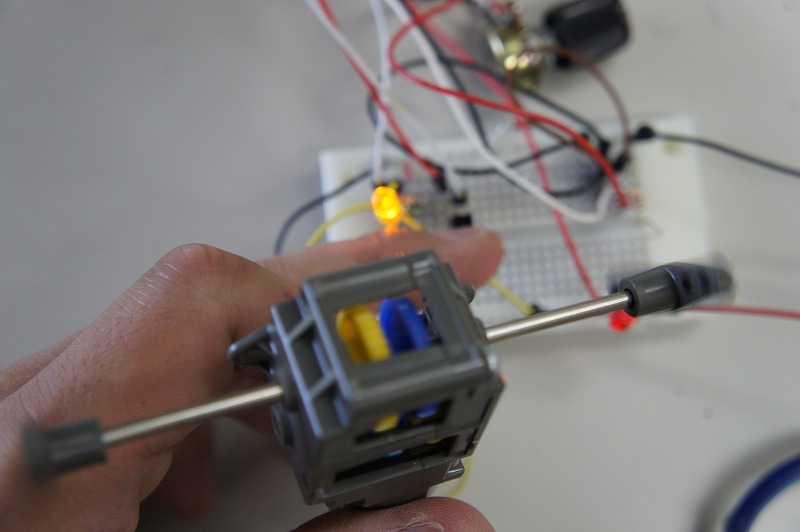
ブレッドボードで構成した赤外線反射モジュール。紙でセンサーを押さえると、モーターが回転し始めます。紙から何mmのあたりで反応させたいか、その感度を半固定抵抗で調整します。
LEDが光るだけでも手ごたえがありますが、実際にモーターが動いた時の喜びはひとしおでした。(それを次の回ではんだ付けで作って動いた時も、「おお!」となりました)
生徒たちは、「これって、指で触るスイッチとかにも使えそう!」と、早くも応用を考え付いてくれていました。
次回も、はんだ付けの続きをします(赤外線反射モジュールは最低二つ必要なため)。それができた人から、NAND回路(で作ったNOT回路)に先のモジュールからの信号を入力として与え、ライントレーサーの動きを実現していきます。