福西です。
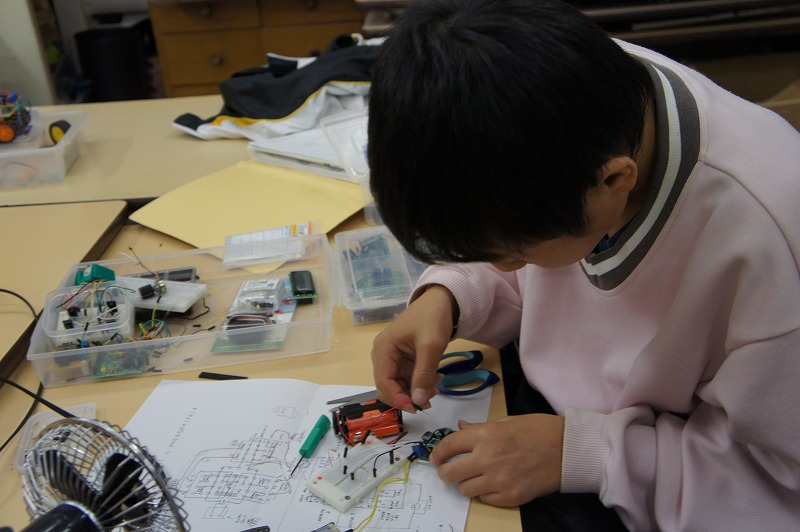
モータードライバーの自作の続きです。R君が第1号で完成しました!

ブレッドボード上の配線を、今度はユニバーサル基盤にはんだ付けしています。

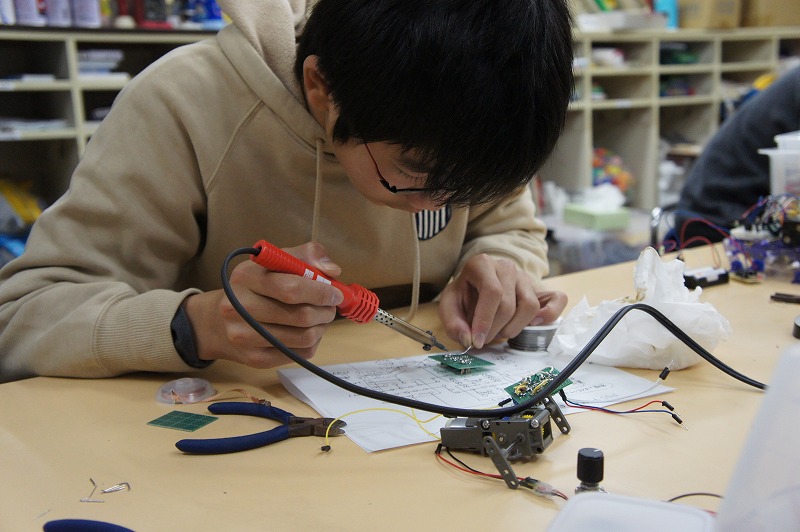
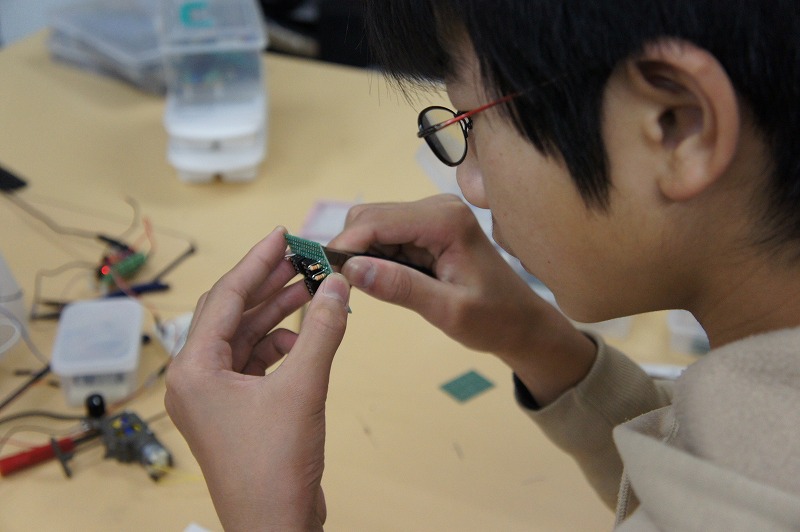
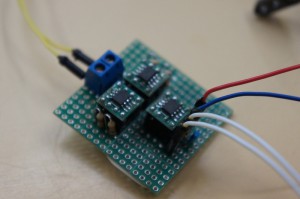
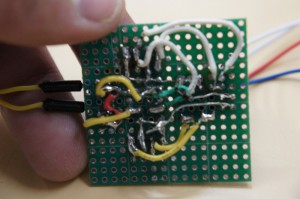
(左は表面。黄色い線がモーターに、白い線がマイコンからの制御信号(入力)、赤が+電源、青がGNDです。右は裏面。配線が一見ごちゃごちゃして見えますが、ちゃんとつながっています。自分の手ではじめて作った、記念すべきR君のモータードライバーです)
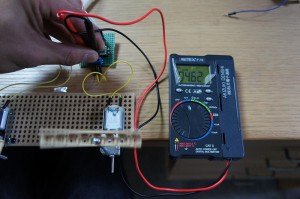
さて、性能ですが、結果は5V→4.4~4.6V。12%ほどの電圧降下(ロス)ですみました。一方市販のモータードライバで模型によく使われるTA7291Pと比較してみたところ、こちらは5V→2.7V~3V。40%以上のロスがあります。これと比べても、自作した甲斐があるというものです。
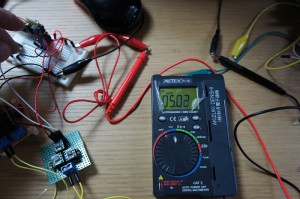
電源電圧は5.02V。

TA7291Pは、約2.9V。
一方、R君の自作モータードライバーは、約4.6Vをさしています。
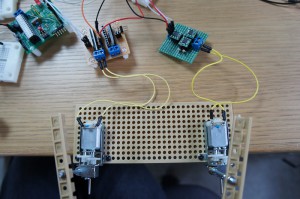
実験の様子を(地味ですが^^;)動画に撮りました。(↑)上の画像をクリックすると、Youtubeに飛びます。
左がTA7291P、右がR君の自作モータードライバーです。つまみを回すことで、正転、逆転、またスピードを調整しています。(PWM制御)

あとの二人のA君とH君のモータードライバーも、もうすぐ完成です。19日(火)から18:30に補講の時間を取りますので、ぜひ今年のうちに完成させて、良い年を迎えましょう!(^^)