福西です。この日は、FETのモジュールをはんだづけして作りました。FETというのは、トランジスタの一種で、3本足の素子です。それが2個入って、6本足とか8本足になっているものもあります。
これがそれです。
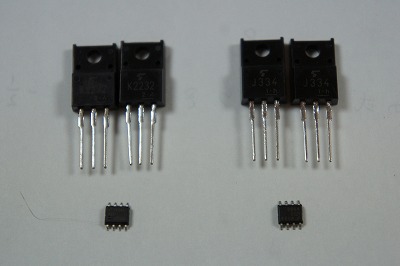
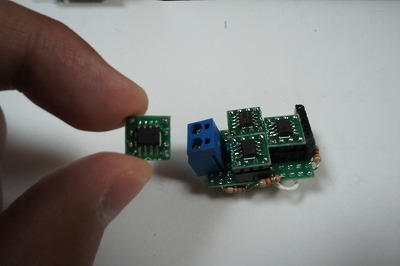
左上:Nch 2SK2232 右上:Pch 2SJ334
左下:Nch NDS9936 右下:Pch FDS4935A
下の小さいのには、FETが2個入っています。性能は異なりますが、だいたい上の3本足のFETが2個入っていると思ってかまいません。(上の方がパワーはありますが、模型のモーターを回すぐらいなら、どちらも性能は十分です)。なので、最初は下のものを使って、モジュールを作ってもらいました。
ここでモジュールというのは、ブレッドボードやメスピンのソケットに挿せるように、足を生やすことです。つまりNDS9936もFDS4935Aも、表面実装用のチップなので、変換基板にはんだづけして、DIP化しておきます。本当は表面実装のチップは表面実装するのがコンパクトで一番なのですが、ブレッドボードに挿せるようにしておけば、あとで色々なFETをくらべて性能を実験したいときにも、取り替えるだけなので便利です。また故障したときにもすぐに取替えがききます。そのように、使いやすい「ブロック」を準備しておこうというのが、今回の作業です。

部品が細かくてはんだがすぐに隣同士くっついてしまいそうですが、フラックスを使えば楽勝です。また失敗しても、はんだ吸い取り線で吸い取る技もうまくなってきました。また余裕がある人には、表面実装用の半田ごて(先が平たいもの)も試してもらいました。これだともっと簡単に(慣れるのに多少技術がいりますが)はんだづけすることができます。
また、それとは別に、何種類かあるFETの中から、データシートを見ながら、自分で「選別する」ということをしてもらいました。特に注目すべき項目は、「オン抵抗」です。これが電圧のロスに直接かかわる性能です。オン抵抗は低ければ低いほど性能がよいです。(ちなみに絶対規格はあらかじめOKなものだけを選んでいます)。


(この中から、ごちゃごちゃ…)
オン抵抗は、50mΩのものもあれば、8mΩや3.6mΩといった驚異的に低いものもあります(特にNchで)。また中にはトラップとして、500mΩ(汎用チップ)や1Ω(1000mΩ:大電流用)とかいうのも、混ざってます(笑)。ちなみに最初はんだづけしてもらったNDS9936は80mΩ、FDS4935Aは35mΩです。(4.5V使用のとき)。そして、それよりももっと性能のいいものがあれば、それをぜひ2作目に使って、比べて欲しいという意味です。


こんなんもあるよと見せたら…(上ではんだづけしたチップのシングル版。足が3本)
「うわ、ちっちゃ…!」
ところで、オームの法則を勉強した人は、次のようにざっと性能を知ることができます。マブチのモーターFA130だと、だいたい1A流れるので、それで計算してみます。(今、Rがオン抵抗にあたり、モータードライバに使うHブリッジ回路では単純にNchとPchの足し算になります)。
例:NDS9936+FDS4935Aを使った場合
E=RI
=(0.080+0.035)×1
=0.115(V)
要するに、0.1Vちょっと電圧降下があることになります。5Vの電池でモーターを回せば、4.9Vの性能が取り出せることになります。
上の例だと、NDS9936がちょっと性能が悪いです。(普通はNchの方がPchより性能がいいです)。しかしこれには、ピン互換のものにμPA2753というのもあり、オン抵抗は36mΩです。(ストックから探してみてください^^)。これを使えば、電圧降下は、0.071Vにおさえられます。(ここまで下がれば、もはや誤差の世界ですけど…)
まあ、大局的にはどちらも0.1V前後ということで、似た性能ではあるのですが、そこに「究極のモータードライバー」を求めるのも一興でしょう(笑)。(かつ、「使いやすさ」+「作りやすさ」も考慮すれば、最強です!)
というわけで、わざと性能がMAXになるものを、最初からは出さなかったのですが、もしそれを見つけてくれたら、どんどんはんだづけ、ないし確保しておいてください。(ジャンク屋さんから掘り出し物を見つけるのは、ディスクリートで作ることの醍醐味です^^)
また、それぞれの部品で足の定義(ドレイン、ソース、ゲート)が異なり、データシートを見て、メモをして控えておく必要があります。(でないと、あとで大変なことになります(笑))
今回時間がありませんでしたが、その性能を来週ブレッドボードで試してもらおうと思います。
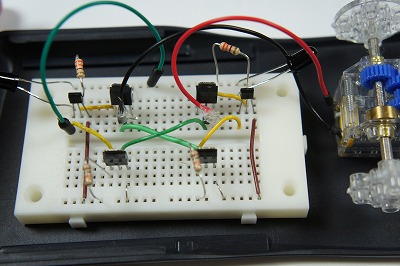
(こんなふうに)
#ちなみに上のは、モーターを回して電圧を測ると、5.1V→4.95V(0.15Vの電圧降下)でした。ぜひこれを超えるシロモノを作ってください!

さて、次回の最終的な目標は、これです。今日はんだづけしたもの(Nchデュアルを2個、Pchデュアルを1個)つかって、いよいよモータードライバの製作に取り掛かります。
(そして故障したら取替え可能、というのが、今作っているやつのミソです。もしかして、これを電子ブロックみたいにしたら、売れるんじゃあないかと…(笑))