「山びこ通信」2016年度秋学期号より下記の記事を転載致します。
『ロボット工作』
担当 小坂 諒
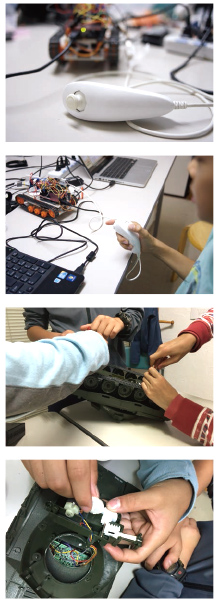 前学期に引き続きarduinoを使って、キャタピラで走る戦車のようなロボットを製作しています。DCモーターの制御は終わり移動に関しては、前学期までに完成していたのですが、砲台のためにサーボを載せたりスピーカーを載せたりしているとコントローラーが複雑でぐちゃぐちゃになっていきました。ロボット本体はタミヤ製のプレートやキャタピラを使用しており、これらは非常に汎用性が高く扱い易かったのですが、コントローラーとなるとそうは行きません。ブレッドボードに加速度センサーやジョイスティックをつけて無理矢理使っていたのですが、機能を増やせば使いづらくなるばかりでした。そこで、任天堂のWiiのコントローラーであるWiiヌンチャクがarduinoで簡単に制御できるようにライブラリが公開されていたので使ってみました。加速度センサーとジョイスティック、ボタンが2つ、と製作中のロボットにうってつけのコントローラーでした。
前学期に引き続きarduinoを使って、キャタピラで走る戦車のようなロボットを製作しています。DCモーターの制御は終わり移動に関しては、前学期までに完成していたのですが、砲台のためにサーボを載せたりスピーカーを載せたりしているとコントローラーが複雑でぐちゃぐちゃになっていきました。ロボット本体はタミヤ製のプレートやキャタピラを使用しており、これらは非常に汎用性が高く扱い易かったのですが、コントローラーとなるとそうは行きません。ブレッドボードに加速度センサーやジョイスティックをつけて無理矢理使っていたのですが、機能を増やせば使いづらくなるばかりでした。そこで、任天堂のWiiのコントローラーであるWiiヌンチャクがarduinoで簡単に制御できるようにライブラリが公開されていたので使ってみました。加速度センサーとジョイスティック、ボタンが2つ、と製作中のロボットにうってつけのコントローラーでした。
男なら誰しもキャタピラの付いたロボットから弾を発射させたいと思うものです。というわけで次は発射装置が必要になりました。こればっかりはコントローラーと同じように既存品を使うのは無理そうです。まずは勉強ということで、私が持っていた戦車のラジコンをみんなで分解してみました。このラジコンなのですが私が小学生の頃に父親に買って貰った物なので、15年程前のラジコンです。このちょっと古くて安価なラジコンを分解するのは非常に勉強になります。分解していくと、みんな口を揃えて「なるほどー!」の連続でした。マイコンや複雑なプログラムを必要としないので、どうして動くのかが構造を見るだけで一発でわかります。最近流行りのドローンを分解しても、「なるほどー!」とはならないでしょう。ドローンはその構造というよりかは、複雑なプログラムのおかげで飛行しているので、見た目自体は非常にシンプルです。この授業で作っているロボットもドローンと同じで多くの動作はarduinoによる制御、つまりプログラミングによるものです。発射装置を作るとなるとガラリと作業は変わって、分解したラジコンのような構造を自分で作ることになります。動作部分があるものを材料を買ってきて作るとなると一気にハードルが上がりますが、生徒さんは熱心に発射装置の構造を考えてくれているので、しばらくはプログラミングを忘れて手を動かしていこうと思います。
ロボット工作の醍醐味はこのようにハードウェアとソフトウェアの両方を、それぞれ行き来しながら自らで設計していき、幅広い作業を経験できることだと思っています。