『山びこ通信』2013年度冬学期号より、クラスだよりを転載致します。
『ロボット工作』 担当:福西亮馬
 冬学期は、タミヤの『レスキュー・クローラー』の組み立てと、有線から無線への改造をしています。
冬学期は、タミヤの『レスキュー・クローラー』の組み立てと、有線から無線への改造をしています。
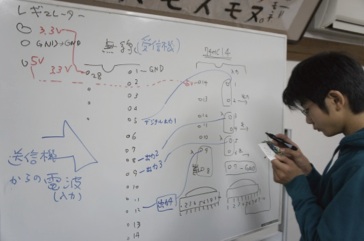
無線には、マイコンのArduinoとも相性の良い、Tocosの『Twe-lite』というモジュールを使いました。まずはこのモジュールのピン配置を確認することから始まりました。次に、受信機と送信機をブレッドボードで組み上げ、いざロボットカーに搭載して実験。仕様書には見通しの良い場所で最大1km交信できるとありますが、山の中だと障害物のあるせいか、数10mの距離にとどまりました。どうすれば飛距離を伸ばすことができるのか、中継器を1つ間に置いたり、アンテナを強くするなど、今後の工夫を必要とする課題です。
さて、室内と違って、屋外ではでこぼこ道の走破性が重要になってきます。そこで従来のタイヤのロボットカーだと不便なので、キャタピラのあるレスキュー・クローラーを作ることにしました。またアームがあると段差を乗り越えすいので、その操縦もポイントになります。今はその機体に無線を乗せ変えているところです。
さてこうして作り終えたものを、いざ何に使いたいかという「仕様」を考える必要があります。それがロボット工作の本来の意義なのですが、今学期はまだそこまでは考え切れていません。ぜひR君の発想に期待しています。R君の仕様によって、どんなセンサーを付ければよいか、すなわちどういう知覚や性能をロボットに持たせたいかが決まります。
たとえば、実際にテレビでよく見かけるような、カメラを搭載した本物のレスキューロボットは、まだ技術的に当分先の夢としても、15mほど離れた距離から目視しながらロボットを無線で操縦し、「町内を一周する」という仕様を考えたとします。その時、すぐ想像できることは、車の危険と、子供の危険です。前者については、道の端ぎりぎりを通ること(その場合溝があると思いますので、これをどう走破するかが課題となります)で回避できるでしょう。後者は、子供が「何これ?」と拾い上げ持ち去る可能性です。そこで一つの解決策は、サイレンの音や「拾わないで!」という音声を発するスピーカーが考えられます。(音声も無線で届けられれば、よりアクティブな解決策ですね)。そのようにロボットは、仕様を考えることで、いくらでもその先の改良・工夫ができます。そのためにも、まずは仕様を考えましょう!
このクラスの生徒は今はR君1人ですが、新1年生の参加もお待ちしています。はじめての生徒には、実際には電子工作が中心になります。そして慣れてきたら、はんだづけをしたり、有線を無線に変えたり、パソコンから書き込んだプログラムでロボットカーを動かしたりと、どんどんグレードアップしていきましょう。